
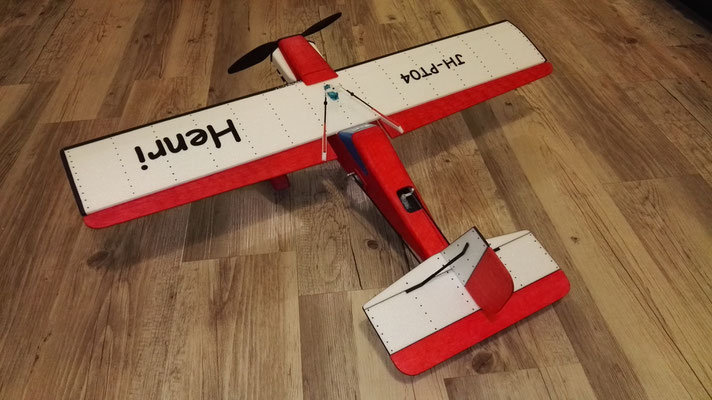
JH-Henri-PT04 Spannweite 700 mm
Projekt in Umsetzung

Vorlage: Eigenkonstruktion
Modellcharakter: Motorflugmodell
Spannweite: 700 mm
RC-Funktion: SR/HR/QR
Fluggewicht: 159 g
Motor: Brushless Motor Pulsar Shocky 1700 KV
Schub: ca. 400 g mit GWS 8x4,3 Zoll
Flugzeit: ca. 4-10 min entsprechend Flugstil
Gesamtflächenbelastung: 15,9 g/dm²
Gesamtflächeninhalt: 10 dm² (ohne Leitwerk)
Akkutypen/Zellen: Lipo/2S 390 mAh
Modellbeschreibung
... so Henri-PT04, der Versuch einer Lightversion von PT-03 startet.
Der Rumpf soll weiterhin aus 6mm Depron bestehen, es lässt sich wunderbar reparieren
und bringt in der Dimension eine sehr stabile Zelle,
außerdem wird das Material ja benötigt um die Kantenverrundung zu ermöglichen.
Die Tragfläche und das Fahrwerk bleiben aus Transportgründen abnehmbar und das Design entspricht
bis auf das Fahrwerk (soll leichter werden) Henri-PT03. Folgende Punkte habe ich zu PT-03 geändert:
- Kapazität Akku von 600 mAh auf 390 mAh verkleinert
- Ruderanlenkung mit Schrumpfschlauch und CFK-Stab
- Ruderscharniere aus UHUPor
- Befestigung Tragfläche zentral über 1x Nylonschraube M4
- geändertes Fahrwerk aus CFK und Depronschubfeld
- Abdeckungsteile aus Holz durch Depron 3 mm ersetzt
- Servo für Seite und Höhe kleiner (4 Gramm Servo)
- Akkurutsche und Klappe entfällt, Akkuwechsel jetzt durch Öffnung im Boden
- Querruder haben nur ein zentrales Servo
- Tragfläche ohne Klappen
- leichter Empfänger
... das ergibt zumindest im CAD ein Abfluggewicht von rund 160 g, was einer Gewichtseinsparung
zu Henri-PT03 (Version mit Klappen) von 54 g entspricht.
Die Flächenbelastung würde sich somit von 21,4 g/dm² auf 16 g/m² verringern
und man sollte doch merklich langsamer fliegen können. Ich bin gespannt ...












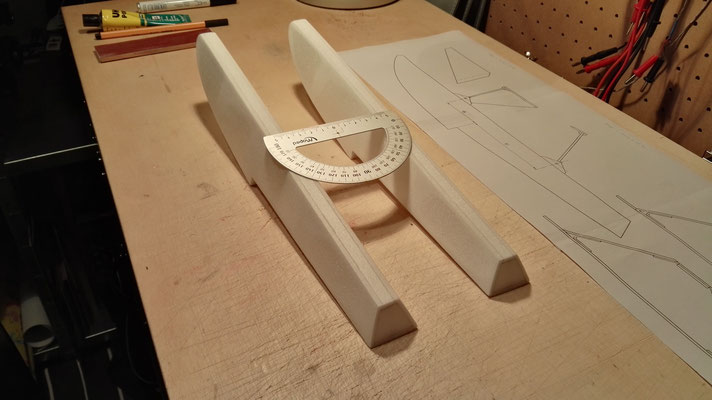
Aufbau Tragfläche































Aufbau Rumpf
















Aufbau Leitwerk


Aufbau Fahrwerk


























Aufbau Schwimmer






































verwendete Komponeneten
1x GWS - Luftschraube 8 x 4,3 Slowfly - 4 g
1x Motor Pichler - Pulsar Shocky 1700KV - 21,5 g
1x Regler Pichler - XQ-12 - 8,3 g
1x Akku Torcster - LiPo 390 mAh 2s1p 7,4 V - 30 C+ - 25 g
1x Servo Torcster - Micro Servo NR-51 - 5 g
2x Servo Torcster - Nano Servo NR-42 - 3,7 g
1x Empfänger - Futaba R-6004 FF, 2.4 GHz FASST - 3,9 g















Einstellungen
EWD: 0-0,5°
Motorsturz: 2°
Motorseitenzug: 2°
Schwerpunkt: ca. 48 mm von Nasenleiste
Seite rechts/links 30 mm Rudertiefe 50 mm
Höhe hoch/runter 15 mm Rudertiefe 30 mm
Quer hoch 20 mm/runter 15 mm Rudertiefe 40 mm
!!! für den Anfang würde ich alle Ruderausschläge per Dual Rate auf die Hälfte reduzieren :) !!!
!!! oder mehr, reagiert recht heftig auf Quer und Höhe !!!

... so Jungfernflug bei Wind 1-2 bft und 2°C Außentemperatur (mir eindeutig zu kalt).
Henri-PT04 benötigte eine minimale Höhenruderkorrektur. Zum Flugverhalten würde ich sagen, analog Henri PT-03, aber merklich langsamer in der Grundgeschwindigkeit, etwas windanfälliger, Rollen kommen gefühlt etwas langsamer, muss zwingend mit Querruder gesteuert werden und reagiert stark auf Höhenruder. Die Befestigung der Tragfläche und das Fahrwerk haben bis jetzt bestens funktioniert.
Mit dem verwendeten Akku 2S 390 mAh habe ich in 4min Flugzeit (gemütlich rumfliegen) 160 mAh verbraucht ...
... so hier mal ein Video in dem Henri seine Crashqualitäten zeigen kann. Ich habe es mal wieder geschafft, Henri dank meiner Grobmotorik im Baum zu parken. Ziel war es eigentlich knapp vor dem Baum wieder aufzusteigen, aber irgendwie war da ein Ast wohl länger als gedacht ...
Das Resultat seht Ihr im Video. Der Schaden bestand aus einem gelösten Motorspant einer zerknautschten Rumpfabdeckung, einigen Einschlägen in der Nasenleiste der Tragfläche und zwei Kieselsteine steckten in der Luftschraube :).
Sonst ist alles heil geblieben und Henri fliegt bereits wieder mit der gleichen Luftschraube ...
Henri geht schwimmen
... so Henri schwimmt. Das Abfluggewicht liegt bei 182g und die Wasserlinie passt ziemlich genau zum CAD- Entwurf.
Die Schwimmer sind farblos lackiert und zerlegbar.
Die Lage auf dem Wasser macht erstmal einen recht stabilen Eindruck
und die Steifigkeit der Anbindung ist denke ich für das Gewicht ausreichend dimensioniert.
... hier das erste Schwimmvideo leider unter Laborbedingungen, der erste richtige Test wird aber erst bei Badehosenwetter erfolgen ...
... hat etwas gedauert, aber Henri durfte im Urlaub endlich aufs Wasser

... Starten und Landen mit Schwimmern ist doch schwieriger als es aussieht,
vor allem bei 182g Abfluggewicht und spontanen Böen (leichte Böen),
aber die Schwimmer funktionieren und dank der Abmessung passte Henri sehr gut ins Urlaubsgepäck.
Hier kommen jetzt meine ersten Flugversuche, viel Spass ...
